Mapeo multihaz del lecho fluvial en vías navegables complejas con el HydroBoat 1200MB
Introducción
Los datos hidrográficos precisos en vías fluviales confinadas y concurridas presentan desafíos notables para los métodos de levantamiento tradicionales. En este estudio de caso, SatLab desplegó su Solución multihaz HydroBoat 1200MB para vehículos de superficie no tripulados (USV)., integrando sistemas de sonar de haz múltiple y de haz único, para realizar un estudio detallado del río Yodo cerca del puente Hirakata, en la prefectura de Osaka, Japón.

Figura 1: Lugar de la prospección
Desafíos del proyecto
El tramo del río planteaba múltiples limitaciones para el estudio:
- Interferencias ambientales: El paso de buques pesqueros, dragas y lluvias ligeras interrumpieron la continuidad del estudio.
- Limitaciones de seguridad y acceso: Las operaciones manuales con embarcaciones ponían en riesgo la seguridad del personal y provocaban lagunas en los datos cerca de los obstáculos.
- Requisitos de precisión: Las características críticas cercanas a los pilares del puente exigían mediciones precisas que superaban las capacidades de los estudios topográficos convencionales.
Los métodos tradicionales de levantamiento topográfico manual y con haz único tienen dificultades para mantener la continuidad de la cobertura y lograr una alta precisión posicional en estas condiciones, lo que impulsa el uso de una solución autónoma e integrada.
Descripción general de la solución de encuestas
El HydroBoat 1200MB combinó tecnologías de sonar multihaz y monohaz con navegación autónoma y procesamiento avanzado de datos para abordar las complejidades del proyecto:

Figura 2: HydroBoat 1200MB en acción
Capacidad de sonar integrada
- La ecosonda multihaz y la ecosonda monohaz HydroBeam M2 ofrecían modos de adquisición flexibles.
- Un algoritmo SPIN (Inversión del Perfil de Velocidad del Sonido) eliminó la necesidad de realizar perfiles de velocidad del sonido por separado, lo que mejoró la eficiencia.
Navegación y planificación autónomas
- Las rutas de reconocimiento se generaron a partir de mapas base DXF/KML proporcionados por el cliente.
- El vehículo de superficie no tripulado (USV) ejecutó rutas preplanificadas con posicionamiento en tiempo real y mínima intervención del operador.
Evitación inteligente de obstáculos
- La plataforma detectó y sorteó obstáculos dinámicos, como embarcaciones y estructuras de puentes, manteniendo una cobertura continua durante todo el estudio.
Flujo de trabajo de procesamiento en tiempo real
- El software SLHydroBeam permitió la visualización en tiempo real de la cuadrícula de profundidad, el filtrado de ruido y la verificación de la precisión, creando un flujo de trabajo impecable desde la adquisición hasta la entrega.
Flujo de trabajo de ejecución de encuestas
1. Planificación de la misión: Configurar el sistema de referencia de coordenadas, importar los mapas base DXF proporcionados por el cliente, definir el área de estudio y generar líneas de navegación optimizadas.
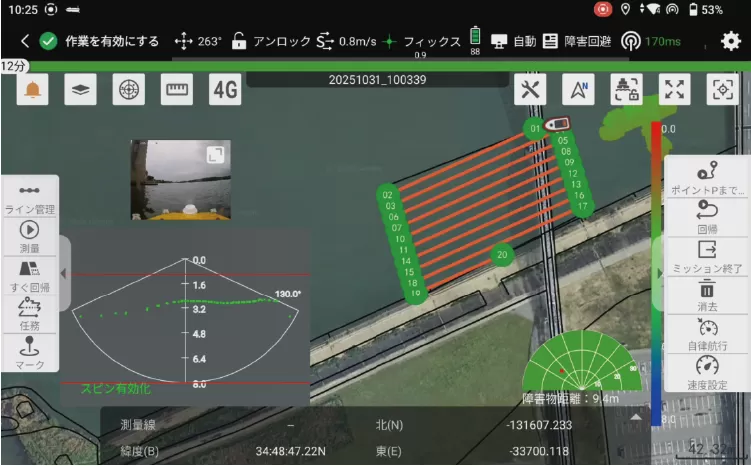
Figura 3: Planificación de la misión
2. Adquisición de datos: El vehículo de superficie no tripulado (USV) realiza sondeos transversales en aguas abiertas para calcular el índice SPIN y, a continuación, cambia al modo multihaz para realizar mediciones lineales automáticas. Se monitorizaron en tiempo real las cuadrículas de profundidad para controlar la cobertura y los cambios en el terreno.
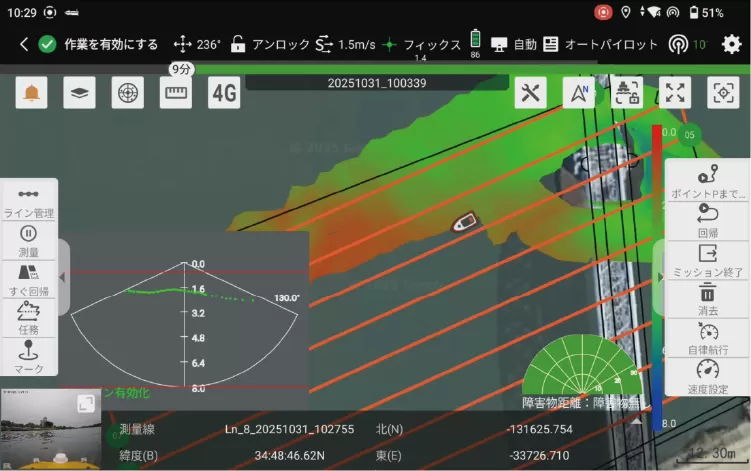
Figura 4: Adquisición de datos
3. Evitación automática de obstáculos: El vehículo de superficie no tripulado (USV) identifica y navega de forma autónoma sorteando obstáculos dinámicos y estáticos, como embarcaciones, dragas y pilares de puentes, manteniendo una adquisición de datos ininterrumpida y una cobertura de línea constante.
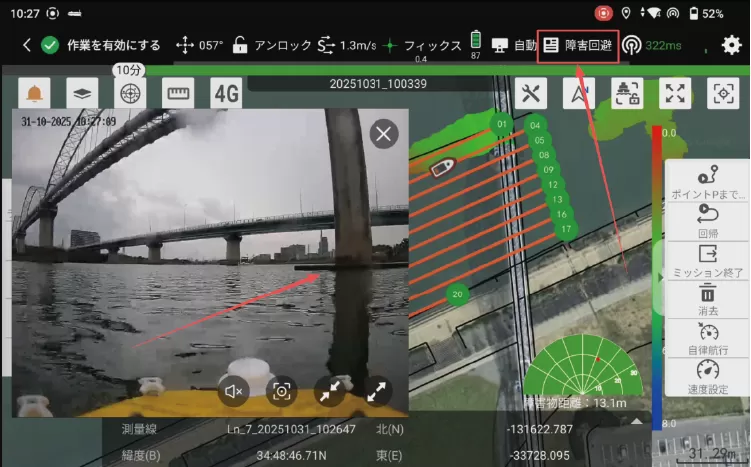
Figura 5: Evitación inteligente de obstáculos
4. Procesamiento de datos y análisis de calidad: Los datos brutos se sometieron a filtrado y reducción de ruido, y las comparaciones entre líneas transversales y haces múltiples/monohaz validaron su precisión. Se observó una fuerte superposición de líneas sin estratificación ni discontinuidades. Los pilares de los puentes y las estructuras subacuáticas se resolvieron con claridad, y el mínimo ruido no afectó la interpretación del terreno. Se generaron modelos 3D del terreno con detalles estructurales, lo que proporcionó conjuntos de datos útiles para el análisis.
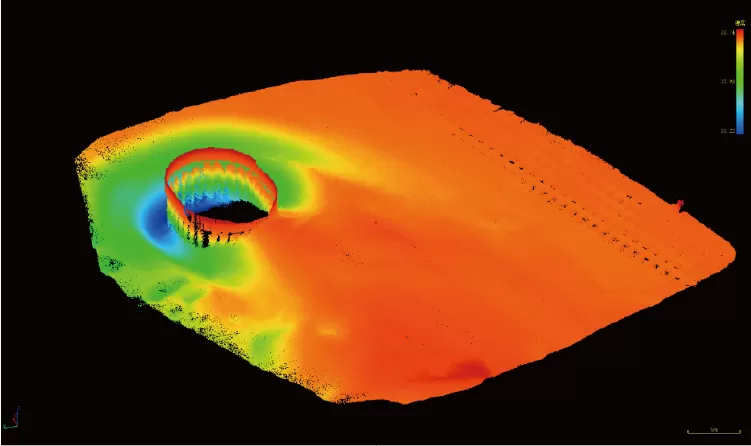
Figura 6: Procesamiento de datos
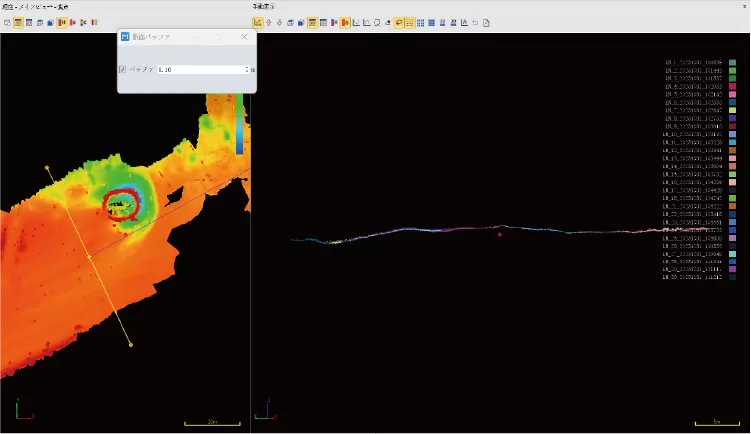
Figura 7: Análisis de calidad
Resultados y entregables
Entregables finales:
Los resultados incluyeron un modelo digital 3D completo de toda el área de estudio, que abarca el terreno, las estructuras subacuáticas (soportes de tuberías, pilares de puentes) y las características detalladas de la erosión, lo que proporciona datos completos y útiles para el análisis de ingeniería.
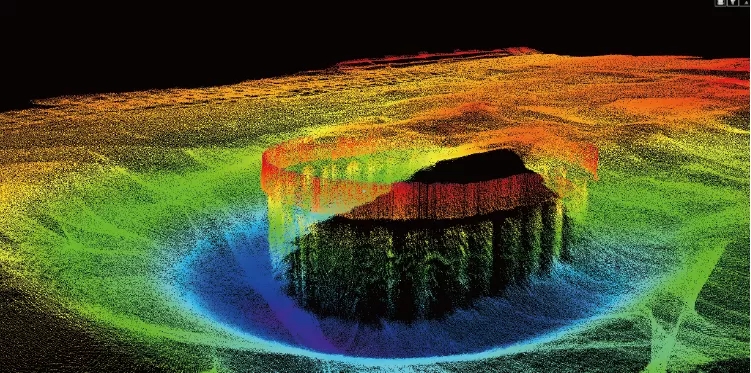
Figura 8: Visualización de datos en 3D
Verificación de exactitud:
El conjunto de datos sin filtrar cumplía con los estándares de la Orden Especial de la OHI.
- 99.48% Los puntos de elevación del sistema multihaz se encontraban dentro de la tolerancia permitida.
- 97.41% Los puntos de profundidad cumplieron con los criterios de precisión requeridos.
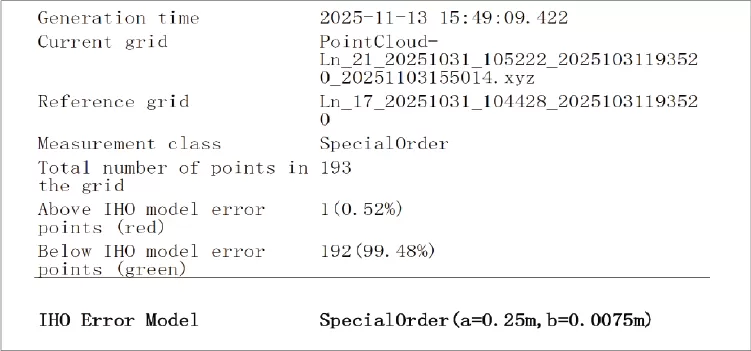
Figura 9: Verificación de la precisión de la elevación
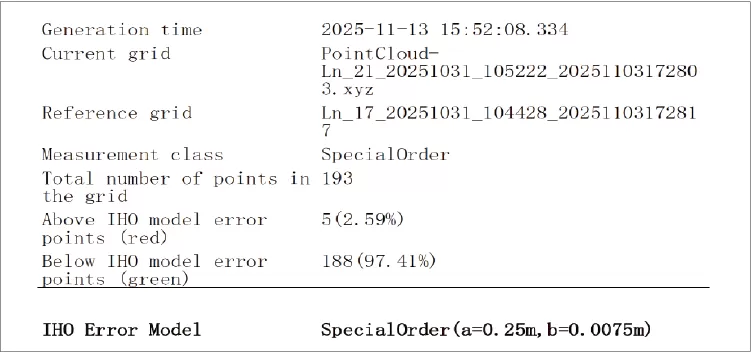
Figura 10: Verificación de la precisión de la profundidad
Valor del proyecto
- Cobertura total en zonas de difícil acceso.
El mapeo autónomo mediante vehículos de superficie no tripulados (USV) permitió operar de forma segura en zonas poco profundas, estrechas y con muchos obstáculos, donde las embarcaciones tripuladas no pueden mantener una cobertura constante. - Precisión certificada
La verificación del cumplimiento de las normas de la Orden Especial de la OHI garantiza resultados fiables para la evaluación estructural y el seguimiento a largo plazo. - Operaciones seguras y eficientes
La navegación autónoma y la evitación de obstáculos redujeron el riesgo en el agua y minimizaron las rutas repetidas, mejorando la eficiencia operativa general. - Productos de datos procesables
Las nubes de puntos 3D en tiempo real, las cuadrículas de elevación en vivo y la salida XYZ directa simplificaron el control de calidad in situ y el procesamiento posterior.
Conclusión
Este proyecto pone de relieve el creciente valor de los vehículos submarinos no tripulados (USV) multihaz autónomos en los flujos de trabajo hidrográficos actuales. En vías fluviales estrechas y con numerosos obstáculos, donde las embarcaciones tradicionales tienen dificultades, el HydroBoat 1200MB ofreció una cobertura impecable, un rendimiento estable y una precisión verificada para pedidos especiales, demostrando así su capacidad como solución fiable para levantamientos fluviales complejos.
Con navegación autónoma, detección de obstáculos en tiempo real y productos de datos 3D listos para usar, el HydroBoat 1200MB permite operaciones más seguras, rápidas y escalables. Para la ingeniería fluvial, la monitorización de puentes y la gestión de vías navegables, ofrece un enfoque moderno y eficiente para la captura de datos de alta resolución, esenciales para la toma de decisiones.
