Multibeam Riverbed Mapping in Complex Waterways with the HydroBoat 1200MB
Introduction
Accurate hydrographic data in confined and busy waterways presents notable challenges for traditional survey methods. In this case study, SatLab deployed its HydroBoat 1200MB USV multibeam solution, integrating both multibeam and single-beam sonar systems, to conduct a detailed survey of the Yodo River near Hirakata Bridge, Osaka Prefecture, Japan.

Figure 1: Survey Site
Project Challenges
The river section posed multiple survey constraints:
- Environmental interference: Passing fishing vessels, dredgers, and light rain disrupted survey continuity.
- Safety and access limitations: Manual boat operations risked personnel safety and caused data gaps near obstacles.
- Accuracy requirements: Critical features near bridge pillars demanded precise measurements beyond conventional survey capabilities.
Traditional single-beam and manual survey approaches struggle to maintain coverage continuity and achieve high positional accuracy in these conditions, prompting the use of an autonomous, integrated solution.
Survey Solution Overview
The HydroBoat 1200MB combined multibeam and single-beam sonar technologies with autonomous navigation and advanced data processing to address the project’s complexities:

Figure 2: HydroBoat 1200MB In Action
Integrated Sonar Capability
- HydroBeam M2 multibeam echo sounder and single-beam echo sounder provided flexible acquisition modes.
- A SPIN (Sound Speed Profile Inversion) algorithm removed the need for separate sound velocity profiling, enhancing efficiency.
Autonomous Navigation and Planning
- Survey routes were generated from client provided DXF/KML base maps.
- The USV executed pre planned lines with real time positioning and minimal operator input.
Intelligent Obstacle Avoidance
- The platform detected and navigated around dynamic obstacles, including vessels and bridge structures, maintaining continuous coverage throughout the survey.
Real-Time Processing Workflow
- SLHydroBeam software allowed live depth grid display, noise filtering, and accuracy verification, creating a seamless workflow from acquisition to delivery.
Survey Execution Workflow
1.Mission Planning: Coordinate reference setup, import client-provided DXF base maps, define survey area, and generate optimized navigation lines.
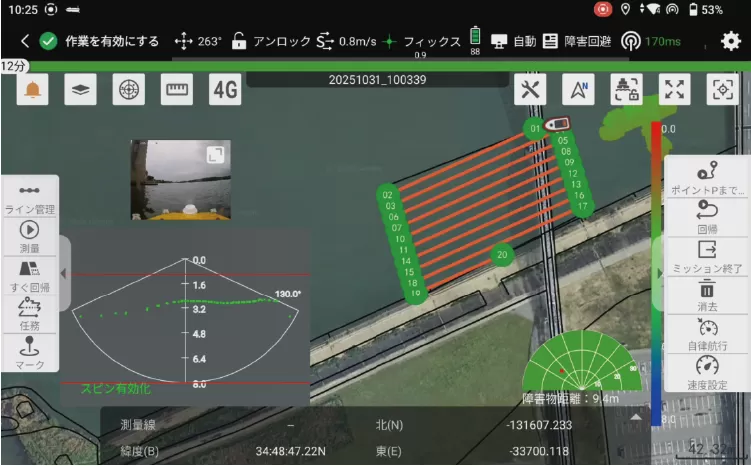
Figure 3: Mission Planning
2.Data Acquisition: The USV performs crossline surveys in open water to compute SPIN, then switches to multibeam mode for automatic line measurements. Depth grids were monitored live to track coverage and terrain changes.
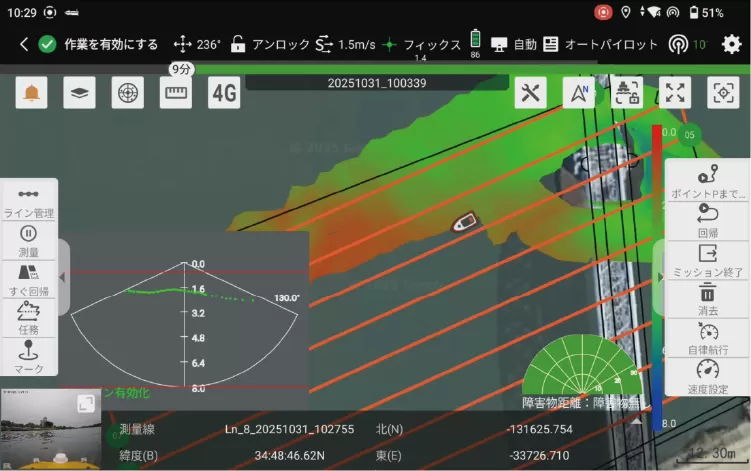
Figure 4: Data Acquisition
3.Automatic Obstacle Avoidance: The USV autonomously identifies and navigates around dynamic and static obstacles—such as vessels, dredgers, and bridge pillars—maintaining uninterrupted data acquisition and consistent line coverage.
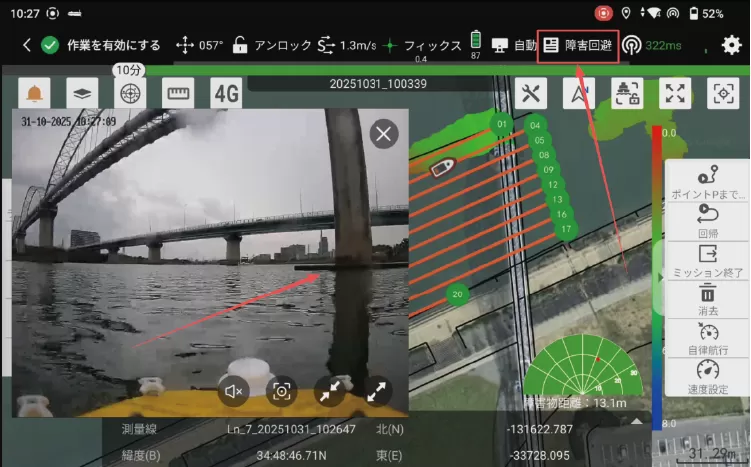
Figure 5: Intelligent Obstacle Avoidance
4.Data Processing and Quality Analysis: Raw data underwent filtering and noise reduction, with crossline and multibeam/single-beam comparisons validating accuracy. Strong line overlap was observed with no layering or discontinuities. Bridge pillars and underwater structures were clearly resolved, and minimal noise did not affect terrain interpretation. 3D terrain models with structural details were generated, providing actionable datasets for analysis.
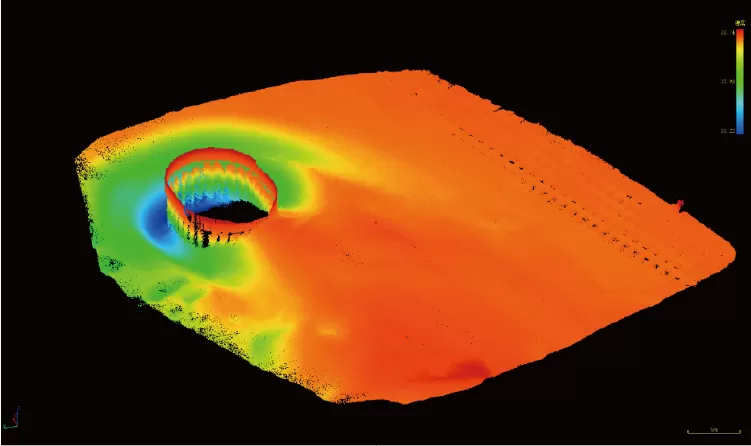
Figure 6: Data Processing
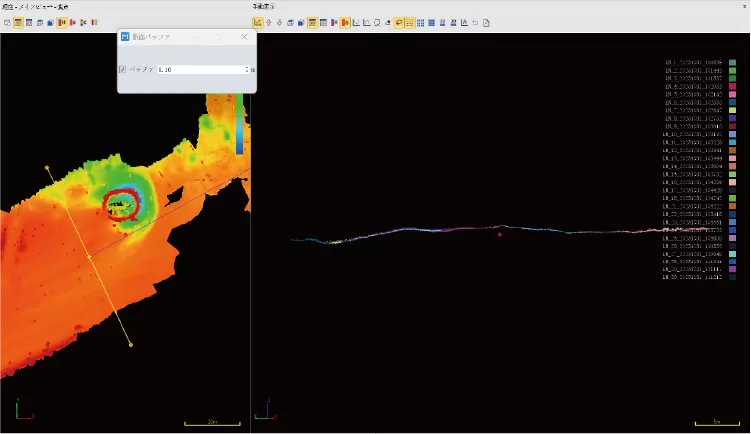
Figure 7: Quality Analysis
Results and Deliverables
Final Deliverables:
Outputs included a comprehensive 3D digital model of the entire survey area, covering terrain, underwater structures (pipe supports, bridge pillars), and detailed scour features—providing complete and actionable data for engineering analysis.
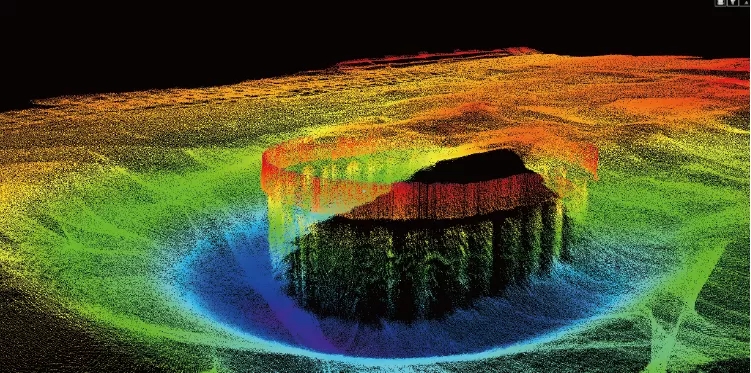
Figure 8: 3D Data Visualization
Accuracy Verification:
The unfiltered dataset met IHO Special Order standards.
- 99.48% of multibeam elevation points were within allowable tolerance.
- 97.41% of depth points met required accuracy criteria.
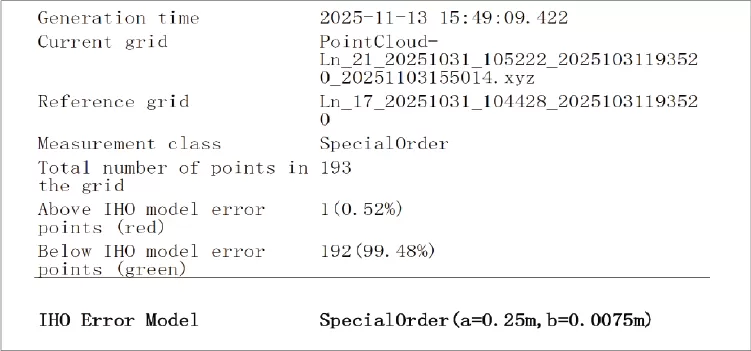
Figure 9: Elevation Accuracy Verification
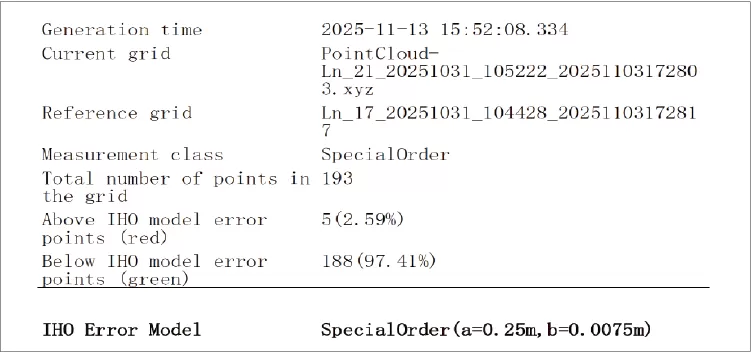
Figure 10: Depth Accuracy Verification
Project Value
- Full Coverage in Challenging Areas
Autonomous USV mapping allowed safe operation in shallow, narrow, and obstacle-dense zones where crewed boats cannot maintain consistent coverage. - Certified Accuracy
Verified compliance with IHO Special Order standards ensures reliable results for structural assessment and long-term monitoring. - Safe, Efficient Operations
Autonomous navigation and obstacle avoidance reduced on-water risk and minimized repeat lines, improving overall operational efficiency. - Actionable Data Products
Real-time 3D point clouds, live elevation grids and direct XYZ output simplified on-site QC and downstream processing.
Conclusion
This project highlights the growing value of autonomous multibeam USVs in today’s hydrographic workflows. In narrow, obstacle-dense waterways where traditional vessels struggle, the HydroBoat 1200MB delivered seamless coverage, stable performance and verified Special Order accuracy—proving its capability as a reliable solution for complex river surveys.
With autonomous navigation, real-time obstacle avoidance and ready-to-use 3D data products, the HydroBoat 1200MB enables safer, faster and more scalable operations. For river engineering, bridge monitoring and waterway management, it offers a modern, efficient approach to capturing the high-resolution data that decision-makers rely on.
