Ormancılık Araştırmalarında Cygnus SLAM Tarayıcısının Uygulanması
BU VAKA ÇALIŞMASINI İNDİRMEK İÇİN TIKLAYIN
Proje Arka Planı
Nokta bulutları, hedef nesnelerin üç boyutlu uzaydaki konumsal ilişkilerini yansıtır ve orman kaynaklarına ilişkin bilgi çıkarmak için önemli veri biçimlerinden biridir.
Orman kaynakları araştırmalarının derinleşmesiyle birlikte, tek platformlu lidardataya dayalı mekansal bilgi edinme yöntemi, hassas ormancılığın orman bilgisi çıkarımında yüksek doğruluk gereksinimlerini karşılayamayan düşük doğruluk ve zayıf veri bütünlüğü gibi eksikliklere sahiptir.
Çözüme genel bakış
Orman alanının ön araştırmasına dayanarak, hava ve yer verilerinin birleştirilmesi yoluyla daha eksiksiz ağaç bilgisi toplamak için bir çözüm olarak düşük maliyetli bir İHA LiDAR ve mobil SLAM sistemini seçtik.
Mobil SLAM sistemi verilerini birleştirmek için Cygnus sırt çantası sistemini RTK ile birlikte seçtik. Yerel ağ sinyalinin zayıf olması nedeniyle, sırt çantası SLAM RTK sistemimiz drone LiDAR sistemiyle aynı baz istasyonunu paylaşıyor ve iletişim harici radyo istasyonu modu üzerinden sağlanıyor.
İki yöntem aynı anda toplanır. İHA, alanı yaklaşık 11 dakikada yakalarken, sırt çantasıyla yapılan SLAM taraması 2 tarama ve tek taramayı içerir ve 30 dakika sürer. Mobil SLAM'in tarama yörüngesi, ağaç etrafında yılan şeklinde bir yörünge izler ve arazi koşullarına göre tarama aralığı 10 metreyi geçmez. Zaman zaman ağaçların kapanması nedeniyle RTK'nin sabitlenememesi sorunu için, sabit RTK gözlemlerinin SLAM yörüngesi üzerindeki kısıtlamalarını artırmak amacıyla, sabit RTK durumunda taramayı mümkün olduğunca tekrarlamaya çalışıyoruz.
Çok platformlu LiDAR sistemlerinin karşılaştırılması
Karmaşık orman ortamı ve yoğun örtüklük nedeniyle, tek bir LiDAR platformunun çalışması sınırlıdır ve tarama aralığı tüm orman alanını kapsayamamaktadır. Bu da mekansal bilgi ediniminde bir veri açığına yol açarak karmaşık orman alanlarında uygulanmasını zorlaştırmaktadır. Daha ayrıntılı orman nokta bulutları elde etmek için genellikle birden fazla LiDAR platformu birlikte kullanılır.
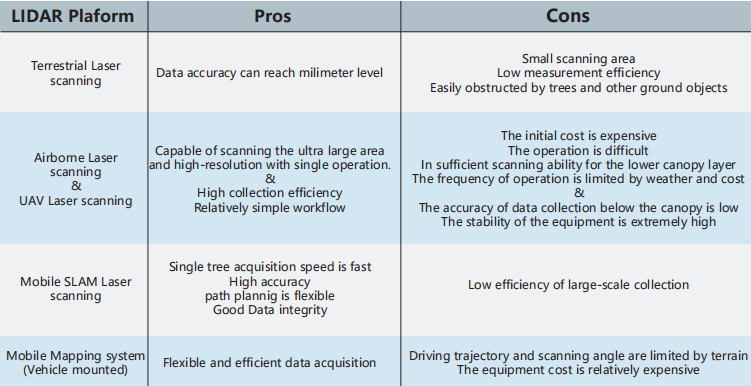
Grafik 1 3B LiDAR sistemlerinin avantaj ve dezavantajlarının karşılaştırılması
İHA LiDAR verileri
İHA LiDAR sistemimiz için, nokta bulutu ve görüntü verilerini aynı anda toplayabilen SatLab S1 İHA LiDAR'ını kullanıyoruz. RINEX verilerini işledikten sonra, GNSS, IMU, lazer ve görüntü verilerini tek tıklamayla veri taraması için SatLiDAR yazılımına aktarıyor ve nihai renkli nokta bulutunu (*.las dosyası) dışa aktarıyoruz.
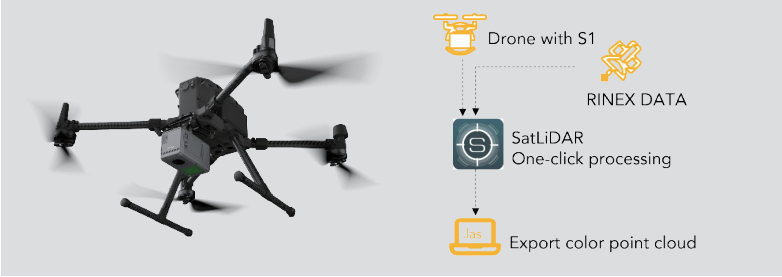
Şekil 1 SatLab S1 İHA LiDAR İş Akışı
İHA'nın uçuş süresi yaklaşık 11 dakikadır ve nokta bulutu yoğunluğu 508,79 pts/m2'dir. İHA LiDAR nokta bulutu ve kesiti aşağıdaki gibidir. Eksik veriler kanopinin altında görülebilir.

Sırt çantası SLAM verileri
SatLab Cygnus sırt çantası SLAM sistemi Şekil 2'de görülebilir. Çıktı SLAM verileri, coğrafi referanslama için yerel koordinatlara dönüştürülebilir. SLAM nokta bulutu Şekil 10'da gösterilmiştir. Nokta bulutu yoğunluğu yaklaşık 2539,59 pts/m2'dir.

Veri birleştirme ve işleme
İHA LiDAR nokta bulutunu ve SLAM nokta bulutunu aynı koordinat sistemine yerleştirdik ve orman bilgilerini çıkarmak için ilgili alanı parçalara ayırdık. İHA LiDAR nokta bulutu ve SLAM nokta bulutunun birleştirilmesi ve birleştirme verilerinin kesiti Şekil 11'de gösterilmiştir. İki yöntemin birleşimi, ağacın tam yapısını göstermektedir. Birleştirme nokta bulutu yoğunluğu 4701,48 pts/m2'dir.


Büyük nokta bulutu işlemenin büyük miktarda bilgi işlem kaynağı tükettiğini göz önünde bulundurarak, birleştirme nokta bulutunu bloklara böldük ve yeniden örnekleme ve gürültü giderme yoluyla nispeten temiz veriler elde ettik. Ardından, zemin nokta bulutunu sınıflandırmak için zemin filtrelemesi olarak kumaş simülasyon filtresi (CSF) ve aşamalı TIN yoğunlaştırma (PTD) kullandık. Zemin noktasına dayanarak DEM oluşturduk. Nokta bulutu normalizasyonunu hesapladıktan sonra, ağaç nokta bulutunu sınıflandırmak için tek ağaç segmentasyon algoritması kullandık. Yanlış segmentasyona uğramış bazı ağaçlar manuel olarak da kullanılabilir.
düzenlendi.
Segmentasyon sonucuna göre, tek bir ağacın türü, konumu, yüksekliği, göğüs yüksekliğindeki çapı (DBH) vb. gibi bilgiler çıkarılabilir. Ayrıca, ağaç yapısının vektörü de oluşturulabilir.



Çözüm
Orman alanında mobil SLAM tarayıcısı tarafından elde edilen çeşitli veriler ile İHA LiDAR'ının birleştirilmesiyle, yüksek hassasiyetli orman dikey yapısı hızlı bir şekilde elde edilebilir ve örnek alanın tek ağaç yapısının parametreleri daha doğru bir şekilde çıkarılabilir.
verimli bir şekilde.
Geleneksel araştırma yöntemlerine kıyasla, işgücü yoğunluğunu ve maliyetleri önemli ölçüde azaltır, veri türlerini zenginleştirir ve izleme kalitesini artırır. Aynı zamanda, veri toplama verimliliğini ve bütünlüğünü artırmak ve daha kısa sürede büyük ölçekli orman bilgilerine ulaşma olasılığını artırmak için ULS (UAV Lazer Tarama) ve BLS (Sırt Çantası Lazer Tarama) gibi platformlar kullanılırken tarama yolunun makul bir şekilde planlanması gerekir.
Yerden havaya LiDAR veri füzyonunun bu yeni uygulaması güçlü pratik öneme sahiptir.


