Kentsel Topografik Araştırmalarda Cygnus SLAM Tarayıcısının Uygulanması
BU VAKA ÇALIŞMASINI İNDİRMEK İÇİN TIKLAYIN
Proje Arka Planı
Kentsel topografik haritalama için, uçuş izninin kolayca uygulanamadığı bazı bölgelerde, yerden mobil ölçüm, esnekliği ve daha az kısıtlaması nedeniyle ideal bir çözümdür. Ayrıca, kentsel topografik haritalama için fotogrametri ve havadan LiDAR gibi havadan uzaktan algılama teknolojilerinin kullanılması, şehrin tam 3B bilgilerini elde edememekte, yer nesnelerinin tıkanması nedeniyle veri boşluğu oluşmaktadır.
Aşağıdaki örnekte, ALS (Havadan Lazer Tarama) verilerine ek olarak, kentsel viyadüklerin ve köprü, yol ve tünel altlarındaki alanların 3B bilgilerini toplamak için SLAM'ın çok platformlu uygulamasını kullanıyoruz. SLAM lazer tarayıcılar, elde taşınabilir modunun yanı sıra sırt çantasında taşıma, araca monteli ve havadan taşımayı da destekleyebilir.
Davaya Genel Bakış
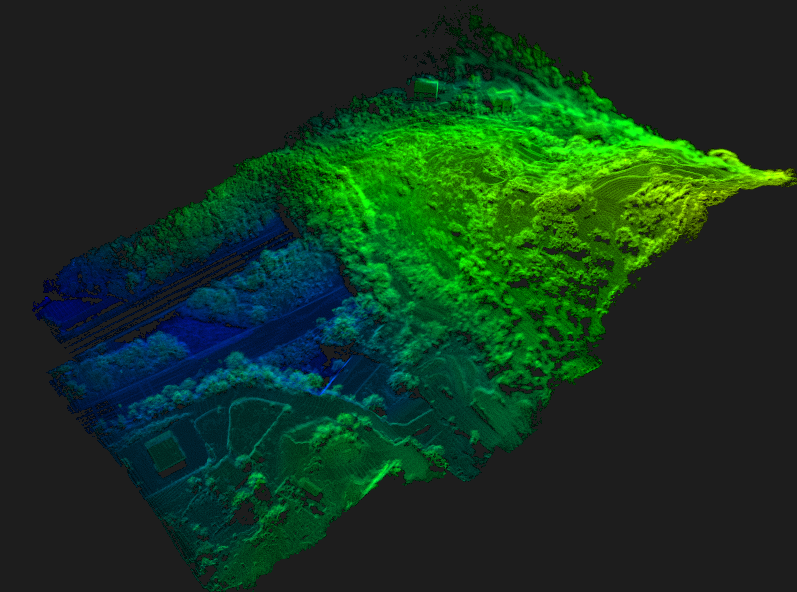
Otoyol ve çevresindeki alanların orijinal ALS verilerine sahibiz, ancak yollar, köprüler ve tüneller hakkında eksiksiz bilgi eksikliğimiz var. Bu alanın tamamlanmış verilerini daha iyi ifade edebilmek için, daha ayrıntılı ve tamamlanmış nokta bulutu verileri yakalamak üzere SLAM tabanlı mobil lazer tarama kullanıyoruz. Orijinal ALS verileri Şekil 1'de gösterilmektedir.
Öncelikle köprü alanı tarandı ve nokta bulutu verisi ön toplama deneyi gibi birçok hazırlık gerçekleştirildi. Saha ortamına ve teknik yöntem doğrulamalarına göre, daha verimli ve esnek bir şekilde yüksek hassasiyetli nokta bulutu verileri elde etmek için bu nokta bulutu veri toplama işleminde araç üstü ve sırt çantası olmak üzere iki tarama yöntemi seçildi. Üst geçit ve köprü altı alanı için sırt çantası lazer tarama yöntemini kullanıyoruz. Yol ve tünellerden bilgi toplamak için ise, tarama için araca SLAM tarayıcıyı yerleştirdik.
Sırt çantası mobil lazer tarama sistemi
Açık hava sahnelerinde, kullanıcılar RTK destekli sırt çantası tipi mobil lazer tarama sistemini kullanabilirler. Sırt çantası tipi mobil lazer tarama sistemi hafif ve sağlamdır ve insanların sınırlı olduğu alanlarda nokta bulutu verileri elde edebilir. RTK gözlemi ve SLAM yörüngesi dönüştürülerek, kullanıcılar mutlak koordinatlı nokta bulutu elde edebilirler. RTK gözlemleri, SLAM'ın mutlak doğruluğunu doğrulamak için yer gerçeği değerleri olarak kullanılabilir. RTK gözlemleri, SLAM kümülatif hatasını düzeltmek için küresel gözlem değeri (kapalı döngü kısıtlamasına benzer şekilde) olarak eklenebilir. Aşağıdaki resim, RTK destekli Cygnus sırt çantası tipi mobil tarama sistemini göstermektedir.

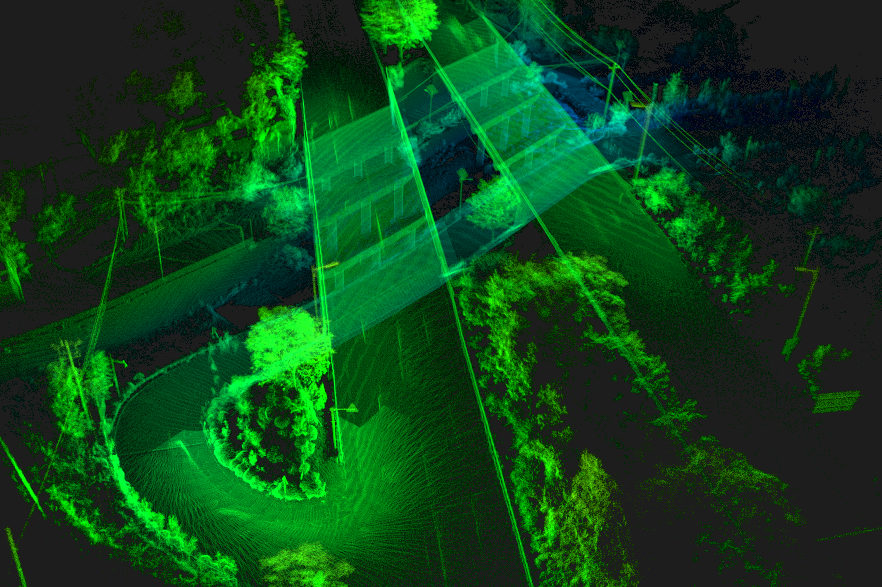
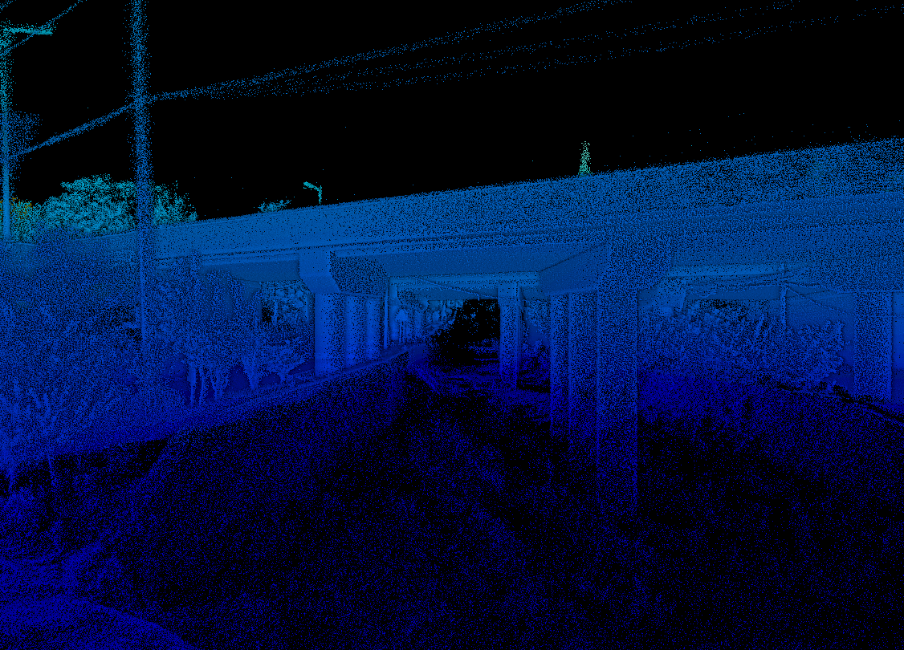
Köprü alanını yakalamak için RTK özellikli Cygnus sırt çantası mobil lazer sistemini kullanıyoruz. Sırt çantası tarama nokta bulutu verilerinin genel görünümü Şekil 3'te, köprünün altındaki alanın ayrıntıları ise Şekil 4'te gösterilmektedir.
Yerleşik SLAM tarama sistemi
SLAM tarayıcılar, araç uygulamalarına da genişletilebilir. Yollar ve tüneller gibi koridor sahneleri söz konusu olduğunda, SLAM tarayıcıyı araca monte etmek, yol boyunca tek yönlü veya çift yönlü seyahat sırasında dinamik olarak veri toplar ve bu da yürüme yerine tarama süresini büyük ölçüde azaltır. Ölçüm cihazı için de nispeten fiziksel olarak uygundur. Araç kiti Şekil 5-a'da, SLAM tarayıcı araç uygulamasının genel görünümü ise Şekil 5-b'de gösterilmiştir.

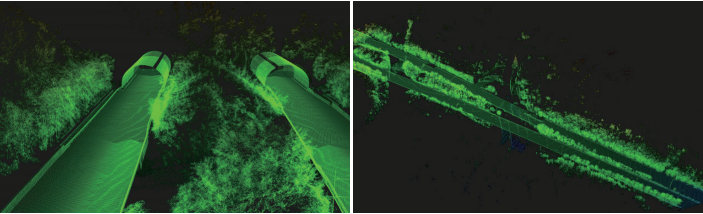
Araca Cygnus SLAM tarayıcıları ve RTK da monte ediyoruz. Daha kaliteli sonuçlar elde etmek için, GNSS sinyalinin kilitlenmemesi durumunda birkaç kontrol noktası belirledik. Ayrıca, gidiş-dönüş tarama işlemi, yörüngeyi kapalı devre yaparak daha güvenilir veriler sağlıyor. Araç içi tarama nokta bulutu verileri Şekil 6-a'da, tünel girişinin nokta bulutu ise Şekil 6-b'de gösterilmektedir.
Çok kaynaklı nokta bulutu verileri
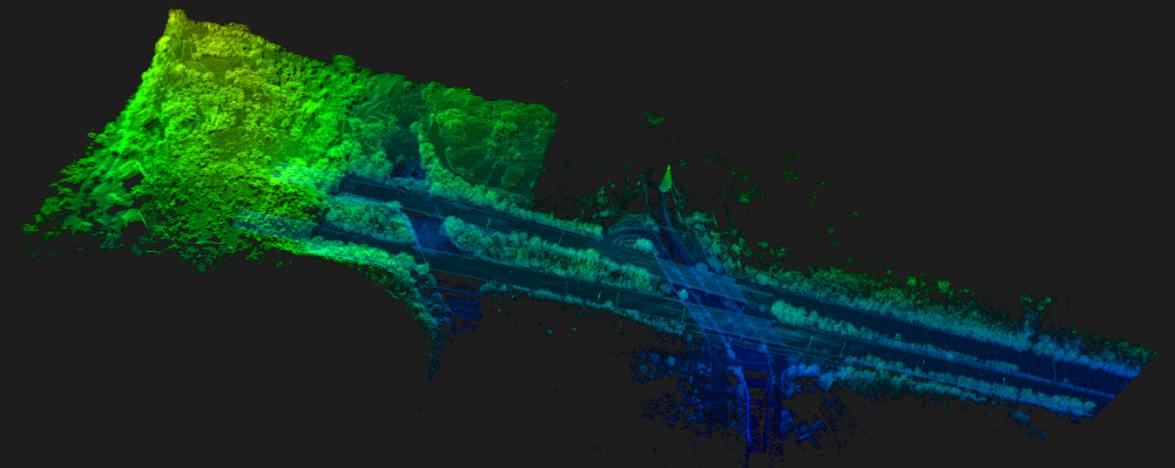
Her iki veri türü de Cygnus'un SLAM Manager APP kontrolü sayesinde tek bir anahtarla otomatik olarak çözülür. Çok fazla manuel müdahaleye gerek kalmadan, gerçek üretimde büyük ölçüde insan gücü ve zamandan tasarruf sağlar. Nokta bulutu veri birleştirme ise araç, sırt çantası ve orijinal hava verilerini tutarlı bir koordinat sisteminde birleştirerek *.las nokta bulutu formatında dışa aktarmaktır. Birleştirilen nokta bulutu verileri, köprünün ve çevresindeki ortamın bütünlüğünü korur ve veri "deliğini" maksimum düzeyde önler. Verilerin tamamı Şekil 7'de gösterilmiştir.
Çözüm
Sırt çantası ve araç üstü gibi SLAM Lazer tarayıcıların çok yönlülüğünden yararlanarak daha iyi veri toplama gerçekleştiriyoruz ve SLAM çözümünü diğer hava uzaktan algılama teknolojileriyle birleştirerek daha eksiksiz ve ayrıntılı üç boyutlu kentsel bilgiler elde ediyoruz.

